|
|
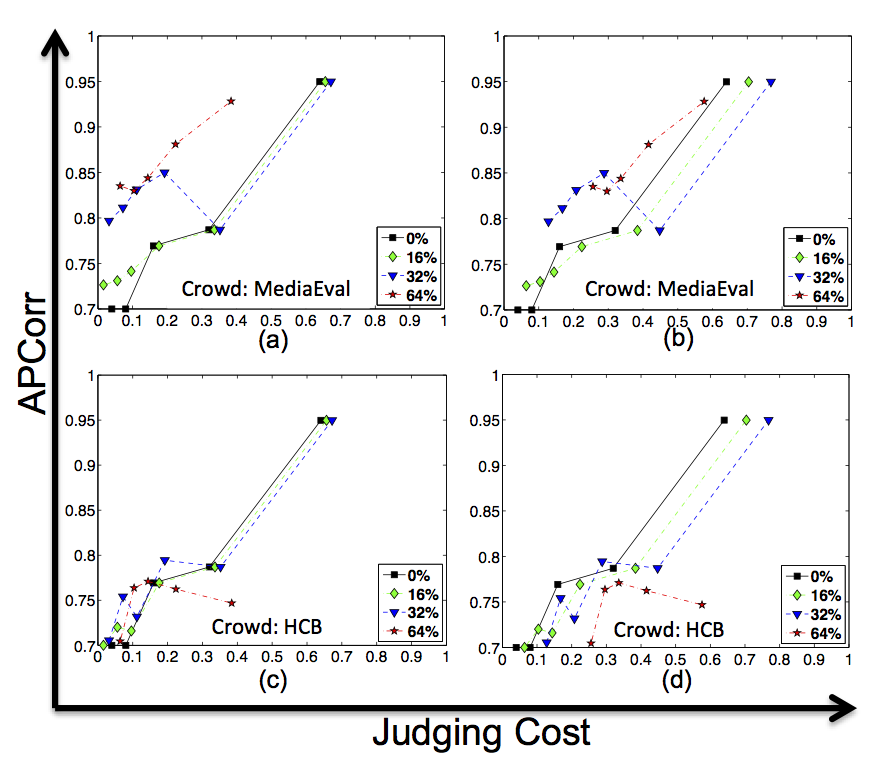
A Collaborative Approach to IR Evaluation
Building test collections to evaluate Information Retrieval (IR) systems is an expensive process, both with regard to time and expert annotator cost. Enabling non-experts to perform quality work has potential to significantly reduce the cost and time required to build test collections; owing to being cheaper on the dollar and more availability in numbers. This work investigates two main problems: 1) inferring consensus from disparate inputs to improve quality of crowd contributed data; and 2) developing a reliable crowd-aided IR evaluation framework. Read More »
|
|
|
|
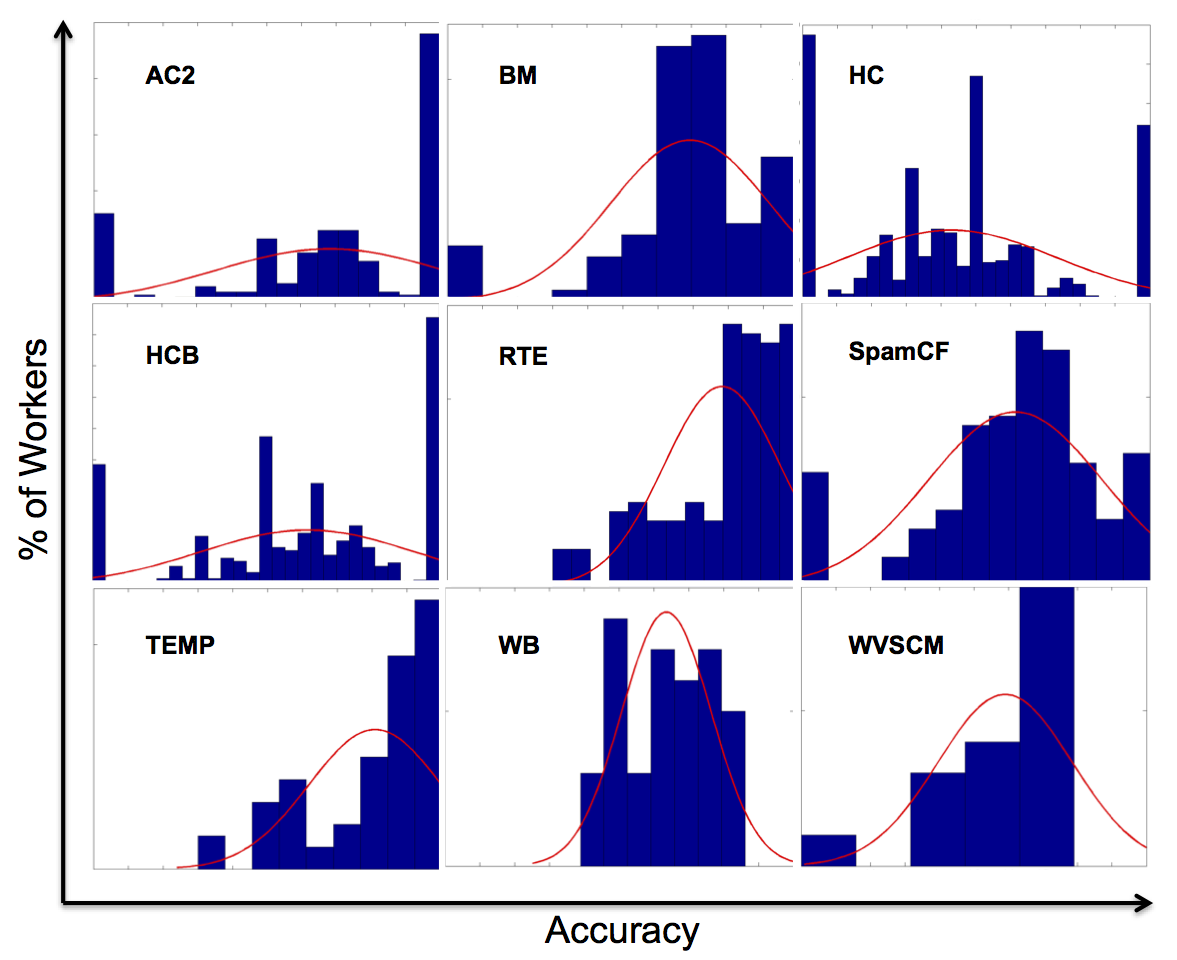
Label Aggregation
Cheap labeling tasks performed on various crowdsourcing platforms has enabled compilation of large datasets for training machine learning algorithms. The workers making label assignments often have varied backgrounds, resulting in vastly different capabilities. In this work, I investigated statistical machine learning methods to model workers and annotation process to enable dependable label aggregation. Go to project »
|
|
|
|
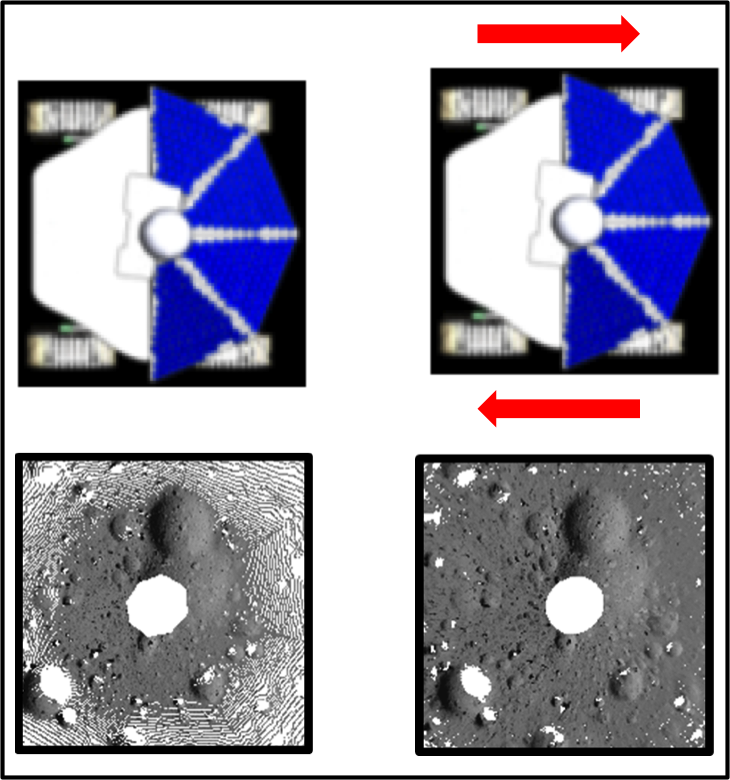
Global Localization and Visual Odometry
Global localization is indispensable for long distance rover navigation. The vast satellite presence around Earth, unlike other planets and moons, makes the use of GPS trivial. In this work, I investigated rover localization using Hi-resolution orbital imagery. LIDAR and camera imagery was used to model local terrain and generate orthographic views, these views were correlated with orbital imagery to estimate global position. Go to project »
|
|
|
|
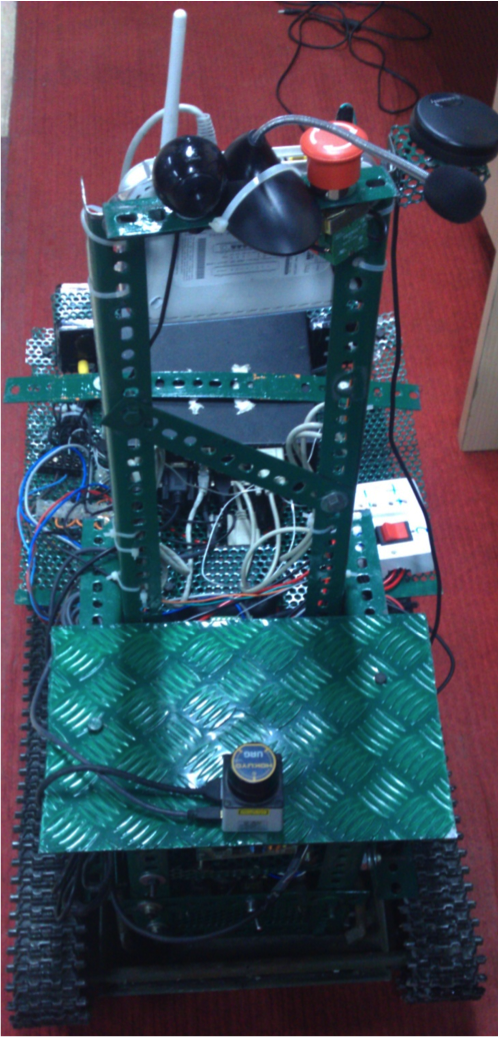
Mapping and Navigation
Mapping and surveillance of outdoor environments requires mobile robots to traverse uneven and rocky terrain. Tracked wheels are great to maneuver in such terrain, but are prone to slip and skid. In this work, I investigated calibration of wheel encoders to dependably estimate relative position. With dependable position estimates I was able to integrate SLAM algorithms to generate reliable maps from traversal. I also assembled the robot base and sensors including circuitry.
|
|
|
|
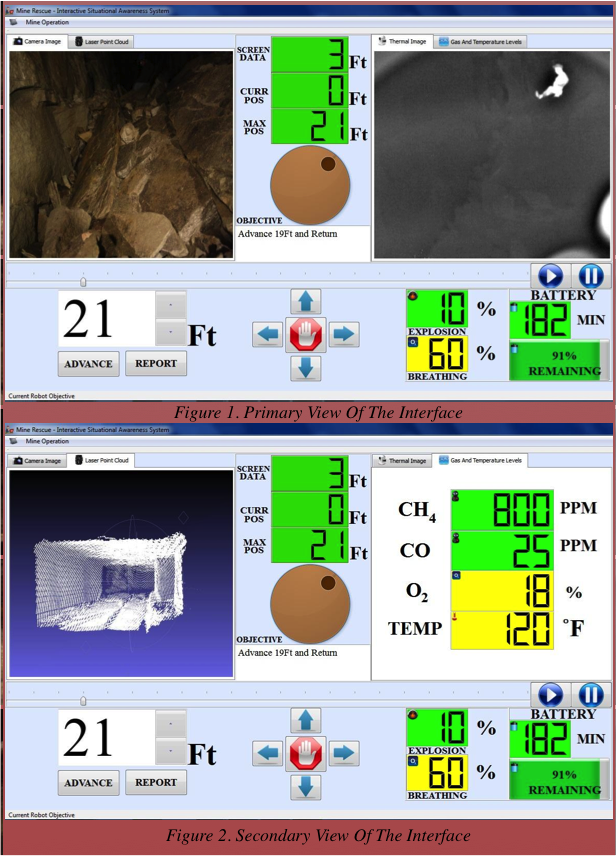
Enhancing Situational Awareness
Situational awareness is critical to the success of rescue missions in hazardous environments. In this work, I investigated integration of robots to enhance situational awareness. I developed an interactive system in the form of a graphical user interface, which displayed data actively as sensed by the robot (Cave crawler). The user interface was designed to be the communication channel and navigation control between the rescue team and the robot. This work involved designing display and sensor configuration, which included hi-resolution cameras, LIDARs and a thermal camera. Read More »
|
|
|
|
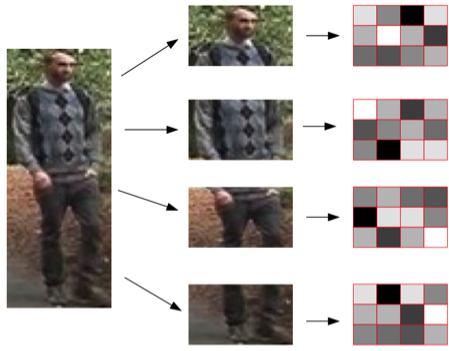
Person Re-identification in a Static Camera Network
Learning visual attributes to recognize objects has gain momentum in the recent past. This work investigated the use of part specific attributes such as 'hasShirt', 'hasShoes', 'isMale' and color histograms to enable person re-identification. Read More »
|
|
|
|
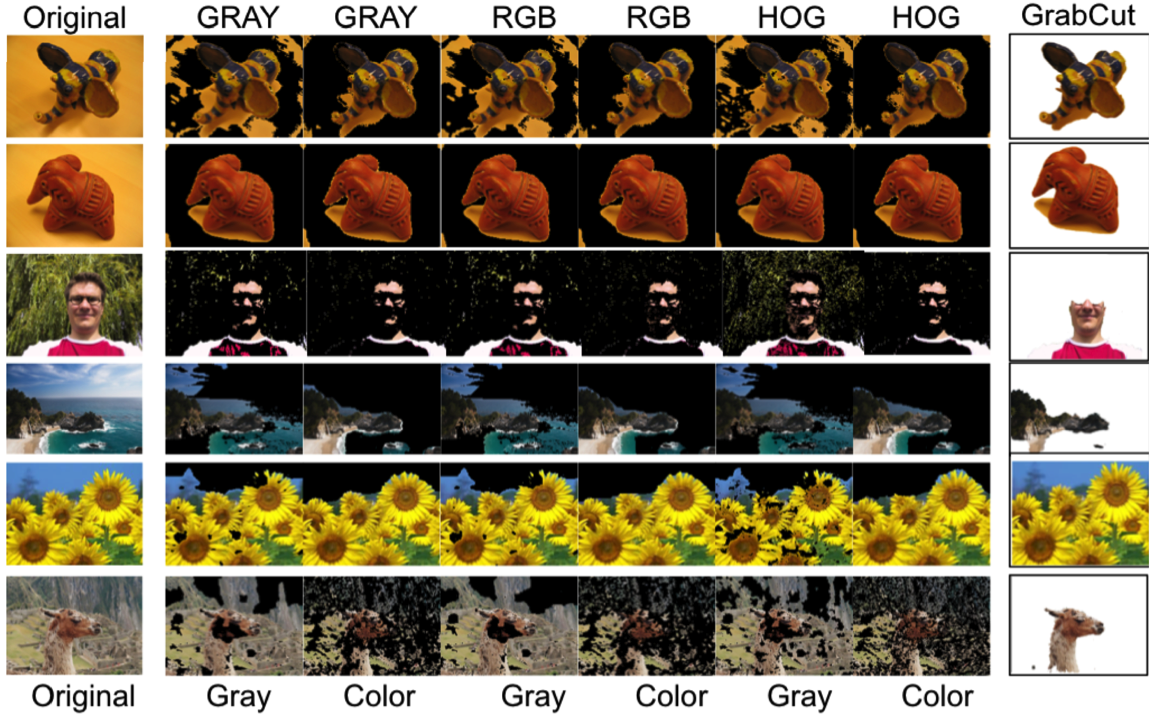
Image Segmentation using Graph Cuts
This work investigated interactive image segmentation, where human input steers the segmentation. Segmentation method was modeled as a st-Mincut problem. The use of local structure encoding image descriptors, like the HOG descriptor, was investigated to model pixel neighborhood similarity. Mixture models and normalized color histograms were used to model foreground and background color distributions. Read More »
|
|
|
|
Ray Tracing the Real and the Unreal
Dipole paintings are portraits where two conflicting objects are juxtaposed in a composition to create meaning. Moreover, this technique often yields interesting pieces of art. Inspired by this technique, this project explored the use of two conflicting concepts: photo and non-photo realism when rendering 3d scenes using ray tracing. Specifically texture mapping, bump mapping, depth of field, a non-photo realistic illumination model and edge rendering was implemented. Follow the link to view "unreal" artifacts and more implemention detail. Code. Go to Gallery »
|
|
|
|
A NLP Approach to Composer Recognition
The goal of the project was to surface hidden structure in music to enable composer recognition. This work investigated applicability of simple N-gram models and supervised HMMs to perform composer recognition between two contemporary artists, Mozart and Haydn. Supervision was automatically derived from sheet music as rhythmic duration and note-to-note intervals. This work was accepted for publication at ISMIR 2013. Read More »
|
|
|
|